Reinforcement Learning Lab 1
Deep Q-Network (DQN) & Double DQN 實作
作業簡介
本專案實作 Double DQN (DDQN) 模型來訓練 AI 遊玩 Atari 經典遊戲 Pong-v5。目標是讓 Agent 從原始像素畫面中學習,最終達到能穩定擊敗電腦的水平。
使用技術 / 環境
- Language: Python 3.9
- Framework: PyTorch
- Environment: Gymnasium (ALE/Pong-v5)
- Algorithm: Double Deep Q-Network (DDQN)
方法介紹 (Methodology)
1. 狀態預處理 (State Preprocessing)
Atari 原始畫面(210x160 RGB)過於龐大。為了加速訓練,我進行了以下預處理:
- Binarization: 將圖片轉為灰階後進行二值化處理(Thresholding),簡化特徵。
- Resizing: 壓縮至 84x84 像素以減少運算負擔。
- Frame Stacking: 堆疊連續 4 幀畫面,賦予模型感知「速度」與「方向」的時間維度資訊。
# 像素處理示範
state = state.astype(np.float32).mean(2) / 255.0
state[state > th] = 1.0 # 二值化
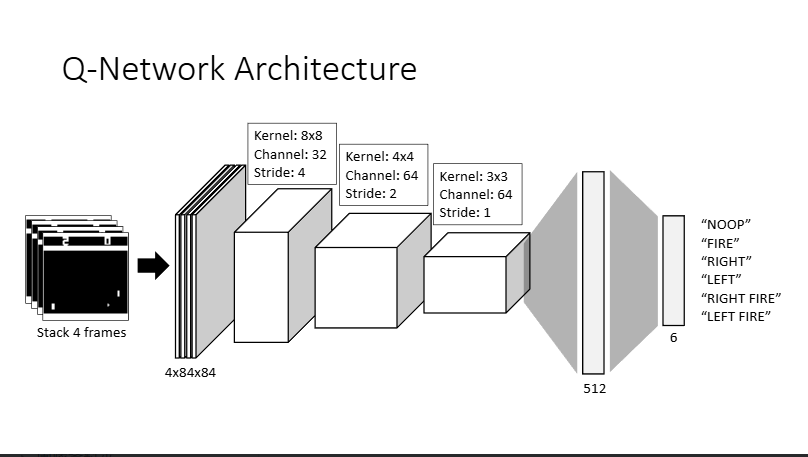
state[state <= th] = 0.02. 模型架構 (Q-Network Architecture)
採用卷積神經網路 (CNN) 作為特徵提取器,後接全連接層輸出各個動作的 Q-value。
3. 從 DQN 到 Double DQN
傳統 DQN 常因同時使用同一組參數「選擇動作」與「評估價值」,導致嚴重的過度估計 (Overestimation) 問題。DDQN 透過分離這兩個過程來提升穩定性:
DQN (容易高估)
# 直接取 Target Net 的最大值
max_next_q = target_net(next_s).max(1)[0]
expected_q = r + gamma * max_next_qDouble DQN (解耦優化)
# 用 Eval Net 選動作,Target Net 算價值
best_a = eval_net(next_s).argmax(1)
next_q = target_net(next_s).gather(1, best_a)
expected_q = r + gamma * next_q訓練技巧 (Training Tricks)
Experience Replay
使用 10,000 大小的 Replay Buffer,隨機採樣以打破資料間的相關性 (Temporal Correlation)。
Epsilon-Greedy
訓練初期維持高探索率 ($\epsilon$),隨步數增加進行線性衰減,在「探索」與「利用」間取得平衡。
實作成果
Training Progress
Training Step: 716 / Episode
Final Reward: +11.0 (Stable Win)
經過長時間訓練後,Agent 已能精確預測球路,並透過快速移動球拍封鎖電腦的所有進攻。Loss 曲線顯示在 100 萬步後趨於穩定。
Demo 結果

相關資源
點擊下方按鈕查看完整的完整程式碼實作。
View on GitHub